

Caenorhabditis elegans is a widely used model in research due to its simplicity and the existence of a complete molecular toolkit and the genome sequence, making it ideal for an efficient study of genetic function. When researching new therapeutic agents, the assays with an in vivo model, such as C. elegans, include the monitoring of its mobility patterns, extracting data such as the number of tail flogs per minute. The escalation of this process and the requirement for constant monitoring make these activities attractive for automatization. For this purpose, researchers from the Polytechnic University of Valencia have developed a technology that will allow obtaining characteristics of C. elegans automatically with a multiple-view optic system.
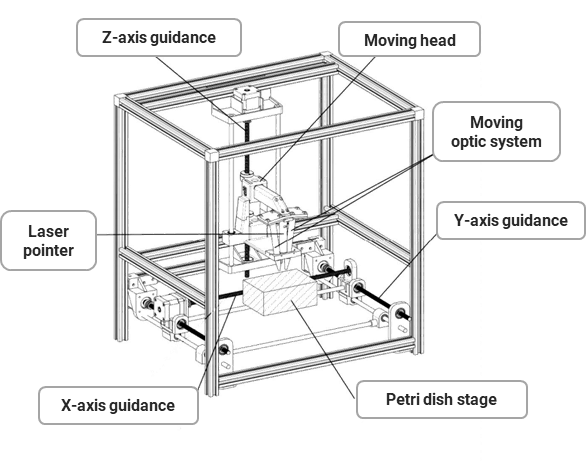
The technology consists in a cartesian robot that moves the track on the XY-axis and the head on the Z-axis. The system includes two optical system allowing a general view of the colony with the macro camera and the microscale framing of each C. elegans with the micro camera and the aid of the laser beam.
The system includes two disruptive characteristics:
- The automated monitoring will enhance productivity and minimize errors, and it will allow the measure of mobility indicators more precisely than optical reviewing.
- The multiple-view strategy system will allow intensive monitoring and control of all elegans in the colony. While individual high-resolution views obtained by the micro camera will allow for a specific monitoring of an individual, obtaining accurate characteristics with high-resolution images.
Regarding the stage of development, analytical and laboratory studies have been performed to validate the feasibility of the system. Moreover, the software is in the last stages of development.
The represented institution is looking for a collaboration that leads to commercial exploitation of the presented invention.
Institution: Universitat Politècnica de València
TRL: 5
Protection status: Patent application
Contact: Noelia Mas / noelia@viromii.com